Yiyi Liao
Zhejiang University

I am an assistant professor in Zhejiang University, leading the X-Dimensional Representations Lab (X-D Lab). Before that, I was a Postdoc in Autonomous Vision Group at the University of Tübingen and the MPI for Intelligent Systems, working with Prof. Andreas Geiger. I received my Ph.D. in Control Science and Engineering from Zhejiang University in June 2018, under the supervision of Prof. Yong Liu, and my B.S. degree from Xi’an Jiaotong University in 2013.
My research interest lies in 3D computer vision, including scene understanding, 3D reconstruction and 3D generative models.
For prospective students interested in computer vision, feel free to contact me via email!
news
| Mar 1, 2026 | We are organizing the Third Workshop on Simulation for Autonomous Driving (SAD) at CVPR 2026. |
|---|---|
| Feb 20, 2026 | Three papers are accepted to CVPR 2026. |
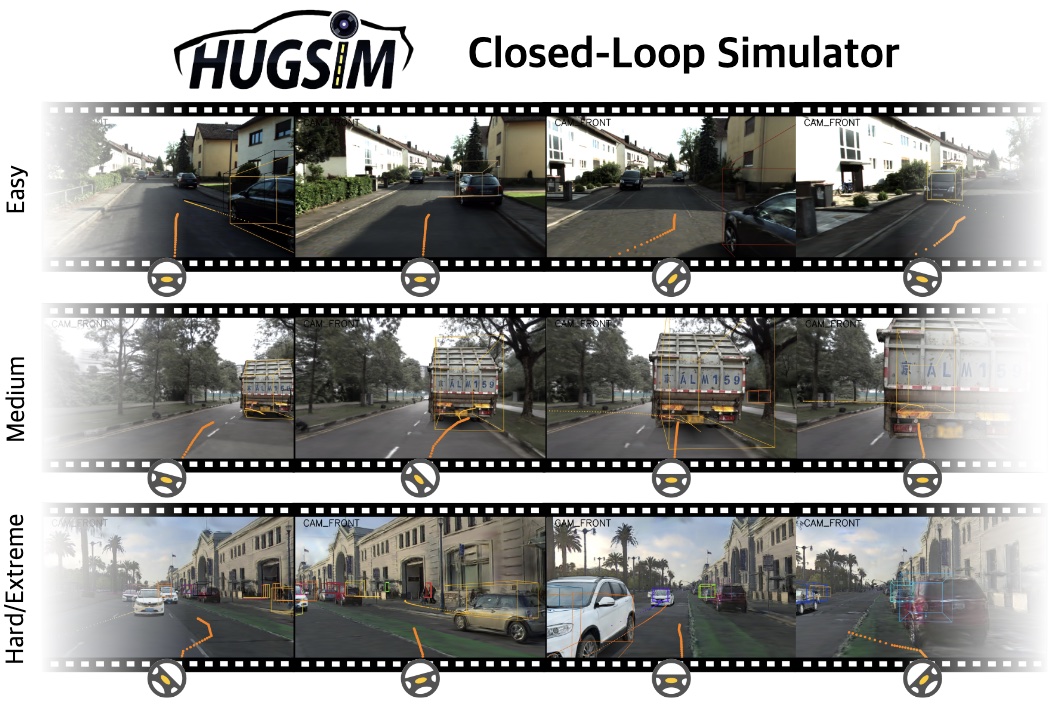
| Dec 17, 2025 | HUGSIM is accepted to TPAMI! |
| Dec 4, 2025 | GSCodec Studio is accepted to TCSVT. |
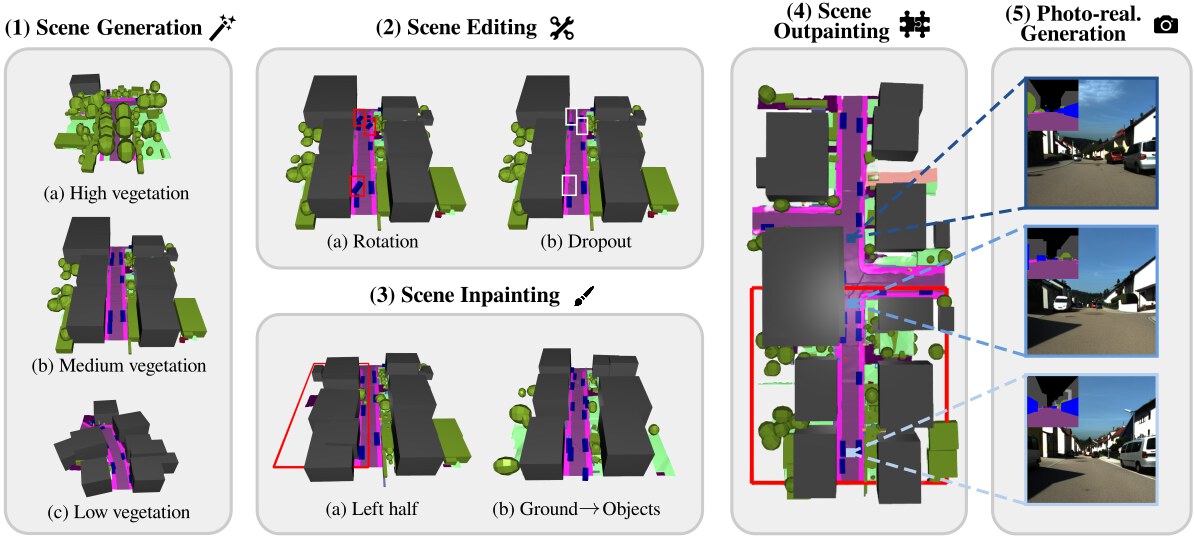
| Sep 23, 2025 | UrbanGen is accepted to TPAMI! |
| Sep 22, 2025 | I am honored to receive the IEEE MMSP Rising Star Award! |
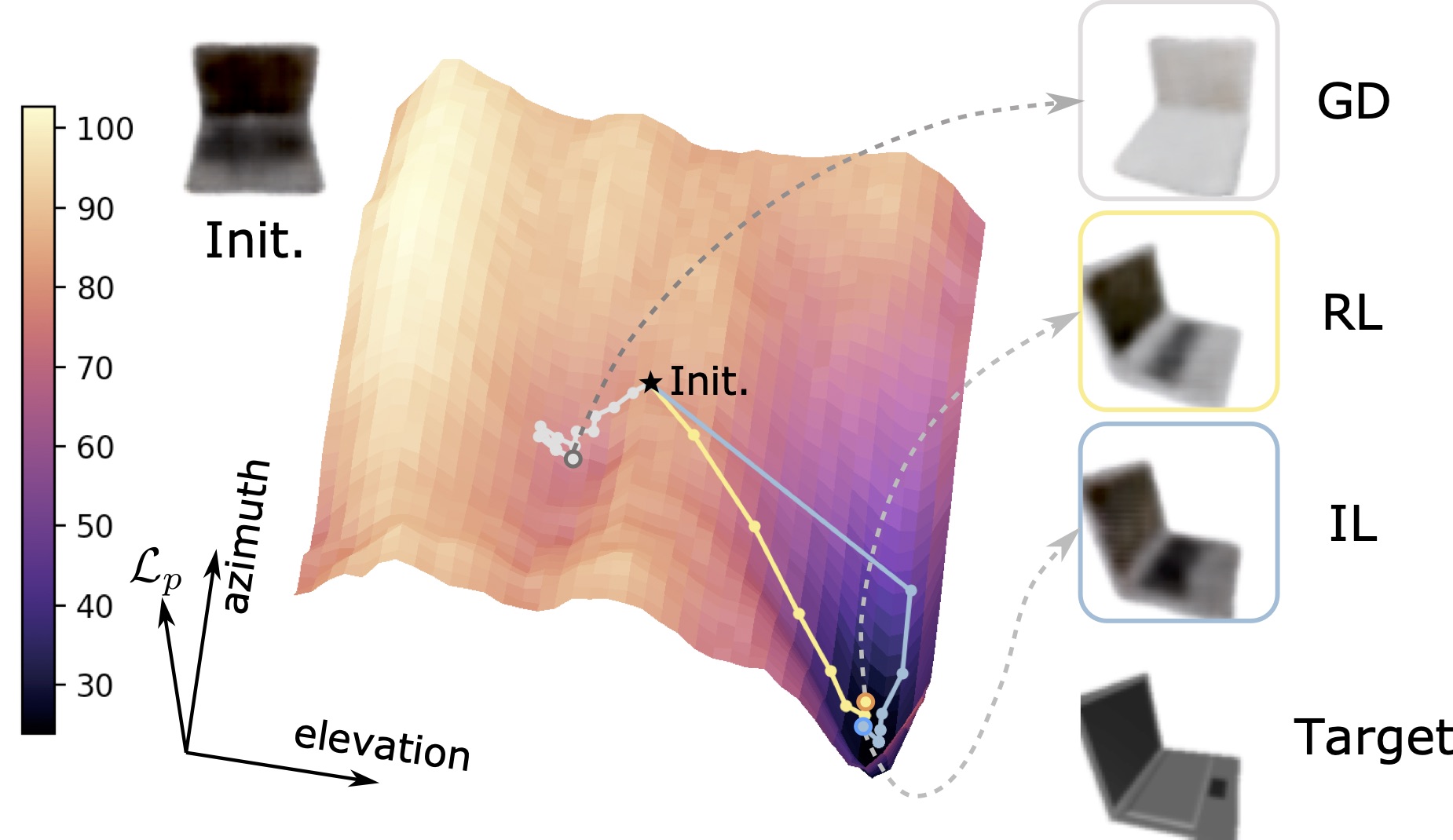
| Sep 18, 2025 | Orientation Matters is accepted to NeurIPS 2025. |
| Jun 30, 2025 | We are organizing the RealADSim Workshop & Challenges @ ICCV 2025! |
| Jun 25, 2025 | Vivid-4D is accepted to ICCV. |
| Jun 18, 2025 | PanopticNeRF-360 is accepted to TPAMI! |
| Feb 27, 2025 | Five papers are accepted to CVPR 2025. |
| Jul 1, 2024 | TEFF, EDUS, and REFRAME are accepted to ECCV 2024. |
| May 16, 2024 | NGEL-SLAM won the ICRA Best Paper Award in Robot Vision! |
| Mar 21, 2024 | I will serve as a Program Chair for 3DV 2025. |
| Feb 27, 2024 | Two papers are accepted to CVPR 2024. |
| Jul 15, 2023 | Three papers are accepted to ICCV 2023. |
| Mar 17, 2023 | I will serve as an Area Chair for NeurIPS 2023. |
| Feb 28, 2023 | Three papers are accepted to CVPR 2023. |
| Sep 16, 2022 | Our VoxGRAF is accepted to NeurIPS 2022. |
| Sep 14, 2022 | I will serve as an Area Chair for CVPR 2023. |
| Sep 11, 2022 | One paper is accepted to CoRL 2022. |
| Aug 5, 2022 | Our Panoptic NeRF is accepted to 3DV 2022. |
| Jul 5, 2022 | Our work on category-level object pose estimation leveraging 3D-aware generative models is accepted to ECCV 2022. |
| Jun 6, 2022 | I was invited to give a talk at the 3D-DLAD workshop at IV 2022. |
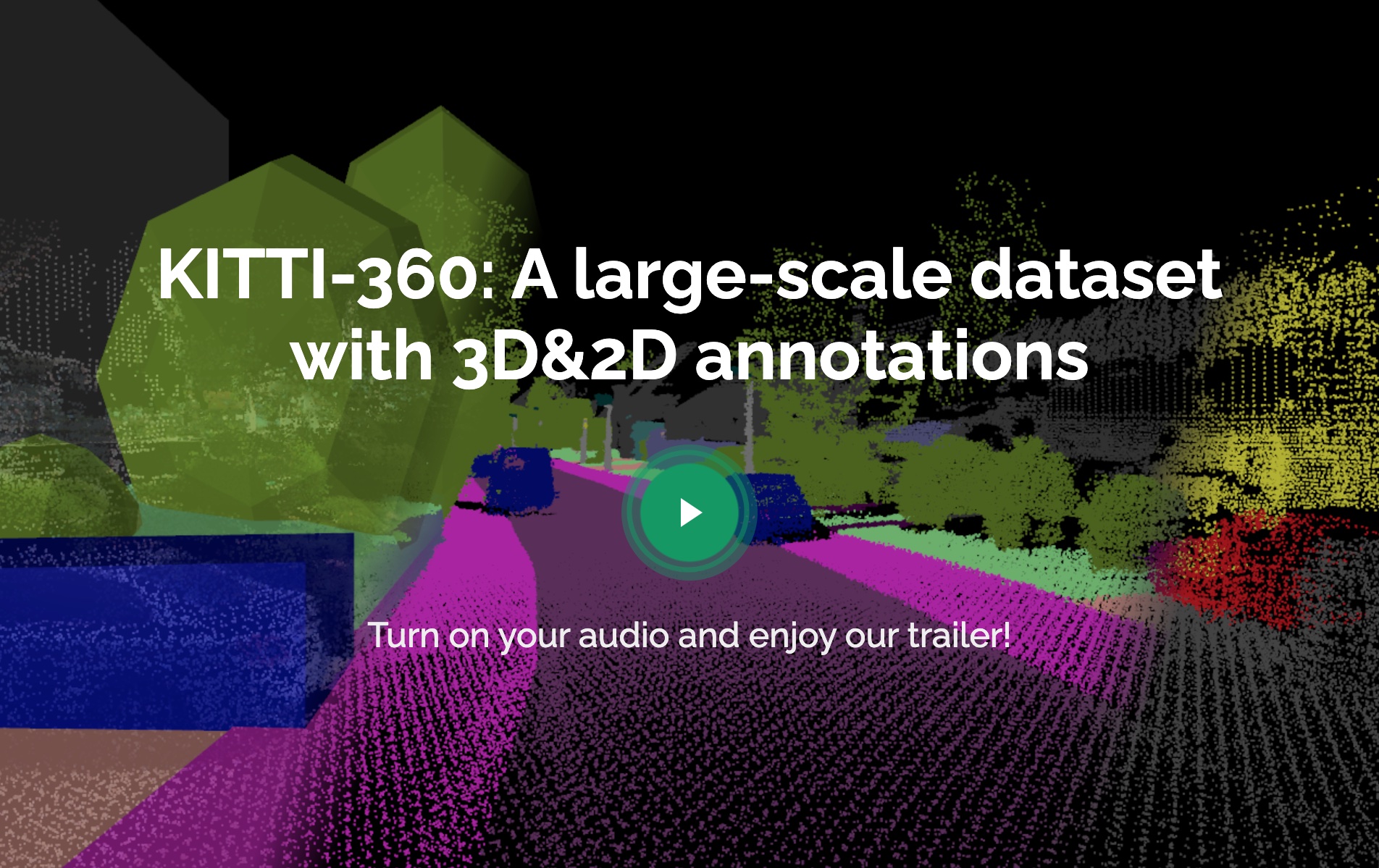
| Jun 4, 2022 | Our KITTI-360 is accepted to TPAMI and we released all benchmarks! Check out our blog for more information of the benchmarks. |
| Apr 15, 2022 | I will serve as an Area Chair for 3DV 2022. |
| Sep 29, 2021 | Two papers (1 oral, 1 poster) are accepted to NeurIPS 2021. |
| Jun 24, 2021 | Our work SMD-Nets was featured on the CVPR Daily and the BEST OF CVPR of Computer Vision News. |
| Jun 2, 2021 | I will be joining Zhejiang University as a tenure-track assistant professor this September! |
| May 31, 2021 | I will serve as an Area Chair for BMVC 2021. |
| May 20, 2021 | I was acknowledged as Outstanding Reviewer at CVPR 2021. |
| Dec 25, 2020 | I was invited to give a talk at Graphics And Mixed Environment Seminar (GAMES). Check the interactive slides on 3D controllable image synthesis. |
selected publications
Full publication list can be found on Google Scholar.
*equal contribution; ♯corresponding author.